麻省理工学院的科学家正在研究软机器人技术,这是一种使用柔性材料而非传统刚性材料的机器人技术。目前,由于缺乏良好的感知能力,软机器人的能力受到限制。一个机械手需要感受它所触摸的东西和它手指的位置,这是大多数软机器人所缺少的能力。
麻省理工学院的研究人员发表了2篇新论文,概述了让机器人更好地感知他们正在与之互动的新工具。具体来说,论文描述了新的方法,让机器人看到和分类项目,以及获得更柔和,更微妙的触摸。研究小组说,这些柔软的机器人手上有装有传感器的皮肤,可以用来捡起从薯片等易碎物品到奶瓶等更重的物品。
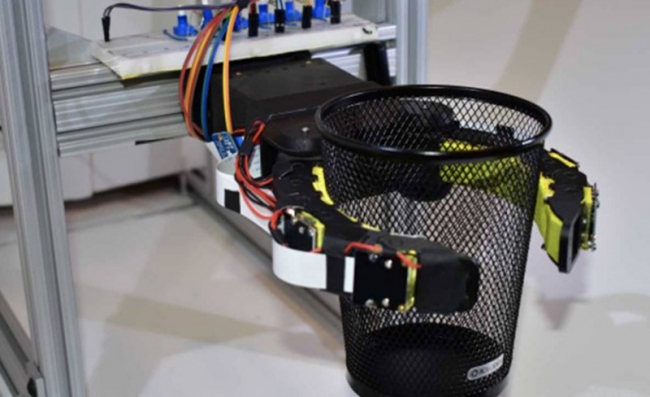
其中一篇论文建立在麻省理工学院和哈佛大学去年的研究基础上。在那项研究中,研究小组开发了一种软的机械手,它是一种锥形的折纸结构。它能够折叠在物体上,捡起比它本身重100倍的物品。研究小组现在已经在折纸结构上增加了由乳胶囊连接到压力传感器的触觉传感器。
新的传感器可以让机器人抓取物体并对其进行分类,让机器人更好地了解它在抓取什么。传感器准确识别出10个物体,准确率超过90%,即使一个物体从夹具中滑出。第二篇论文概述了研究人员发明的一种称为“GelFlex”的手爪,该手爪使用嵌入式摄像头和深度学习,实现高分辨率触觉感知和对机器人身体运动位置的感知。个手爪看起来像一个两个手指的杯子夹持器,它使用肌腱驱动的机制来驱动手指。当对各种形状的金属物品进行测试时,该系统能够准确识别超过96%的物体。
来源:cnBeta.COM